

Journey So Far...
Origin: 20 May 2013
Milestone I : MARK I
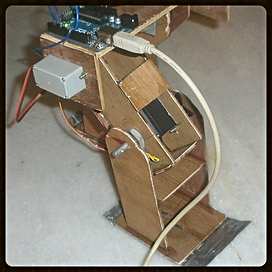
Team Humanoid began its understanding of humanoid domain of robotics with the help of a basic model, which we ‘d like to call MARK-I. It was a wooden bipedal structure with steel foot plates, powered and controlled by Arduino UNO. There were 4 servo motors in the overall biped. The angles were determined via trial and error and the structure was made to walk. The motion was not perfect and but it made the understanding of knee joint very helpful. During the analysis of the walk it was realised that another set of servos is required to improve the walking. Also wooden structure even though being strong wasn’t flexible enough for the joint to be rotated properly.
Milestone II : MARK II
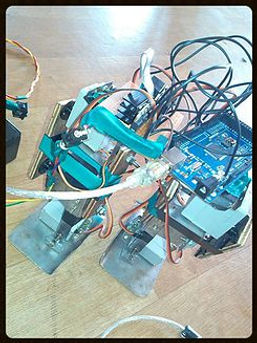
The team was now ready to welcome new members but the challenge was introducing them to this new field of robotics and there was no best way than to share the experiences and let them work out the rest. It was then MARK-II came into existence, steel structure, powered by lead-acid battery and controlled by Arduino MEGA. The structure now had a set of ankle motors. This made the walking algorithm simple. Initially the servos weren’t responding as expected it was then we realised that there was a problem in our power supply design system. So a central power supply design board was designed which had provision to power Arduino as well. Finally after weeks of tireless coding the MARK-II model made a much better motion. However we realised that due to less length of the bot the system wasn’t unable to balance itself perfectly so a proposal was made to increase the length of the bot. Also the power design supply board proved to be an efficient and safe approach and will be kept for the final bot as well.
Milestone III : MARK III
After gaining experience from MARK-I & II the team now decided to work on with more powerful motors. They come under a class of ‘Smart Servos’. So we designed MARK-III. First a CAD model was prepared and after approval, the structure was realised with the help of aluminium steel. It had high precise motors DYNAMIXEL, a central power supply, a dedicated controller for motors and it stood tall with a height of about 88.5 cm. The model design was then given to our control engineers and all the angles were calculated. Then the coding team worked on those angles and finally a perfect humanoid walk was achieved. But without the sensors calibration was difficult, also we realised that the ankle design has to be much better and more like the human ankle.


Milestone IV: Autonomous Car Parking System
But Team Humanoid is not just about humanoids we also let other project or research ideas develop. Before working on MARK-III the team designed a car that was able to park itself. It gave team mechanical a chance to learn more about cars, a common passion amongst them, while electronics people got a chance to design another better and improved power supply and finally coding engineers learnt sensor calibration. The control team decide the parameters that would control the car’s ability to determine space and how it would turn and park itself.
Milestone V : MARK IV
After the successful walk of our tallest biped model (MARK III), our team is setting an aim for the Darpa Robotics Challenge to be held in 2015. So now meet our new Humanoid MARK IV (Vajra) which is weighed at 3.8kgs and has been fabricated using Industry grade Aluminium. This bot has 18 degrees of freedom and is run on 4th generation Intel core i7 processor with an ARM Cortex M3 controller powered by Turnigy Nano Tech 3S Lipo Battery (5000mAh).It is fully actuated using Smart Servos by Robotis, the Dynamixel MX-64T.A few other features include a 9 DOF IMU, Vision Sensor, Encoders, Force Sensor, Temperature Sensor and Current sensor.So hold your breath and tighten your seat belts because soon you will see this beast in action.

Milestone VI : MARK V
After gaining experience from MARK-I & II the team now decided to work on with more powerful motors. They come under a class of ‘Smart Servos’. So we designed MARK-III. First a CAD model was prepared and after approval, the structure was realised with the help of aluminium steel. It had high precise motors DYNAMIXEL, a central power supply, a dedicated controller for motors and it stood tall with a height of about 88.5 cm. The model design was then given to our control engineers and all the angles were calculated. Then the coding team worked on those angles and finally a perfect humanoid walk was achieved. But without the sensors calibration was difficult, also we realised that the ankle design has to be much better and more like the human ankle.
